ArduBlock、motoBlockly課程:motoduino自走循跡車(直流馬達)
●循跡車介紹:
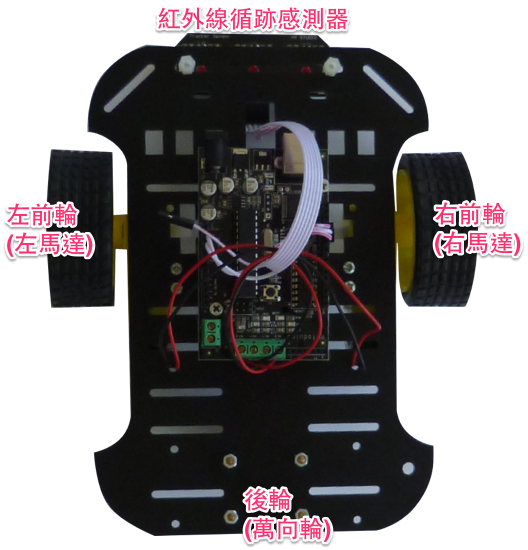
●中間的主板是motoduino,可以直接控制直流馬達,詳細規格連結「官網介紹」

●「直流馬達」連接「控制板」接線

●連結啟動ArduBlock
1.連結motoduino要選Arduino Duemilanove or Diecimila

2.選擇連接COM埠

3.啟動ArduBlock

●前進的程式:
motoBlockly

ArduBlockly

●試試看如何「後退」??
●轉彎(以左轉為例)
1.左輪不動,右輪向前轉 (會以左輪為支點左轉)


3.左、右輪均向前轉,但右輪速度比左輪快(車子會邊向前走和左轉)

挑戰2:單點循跡車
●紅外線循跡感測器介紹:
◎感測器上面:有偵測指示燈
偵測紅外線反射(白色地板會反射),會亮紅色LED;(黑色地板不反射),則不亮紅色LED

◎感測器下面:(藍點)紅外線發射器,(黑點)紅外線接收器)

◎感測器側面:觀察紅外線發射和接收的狀況

●如何利用單偵測循跡

程式示範:
motoBlockly

ArduBlock

挑戰3:兩點循跡車


留言
張貼留言